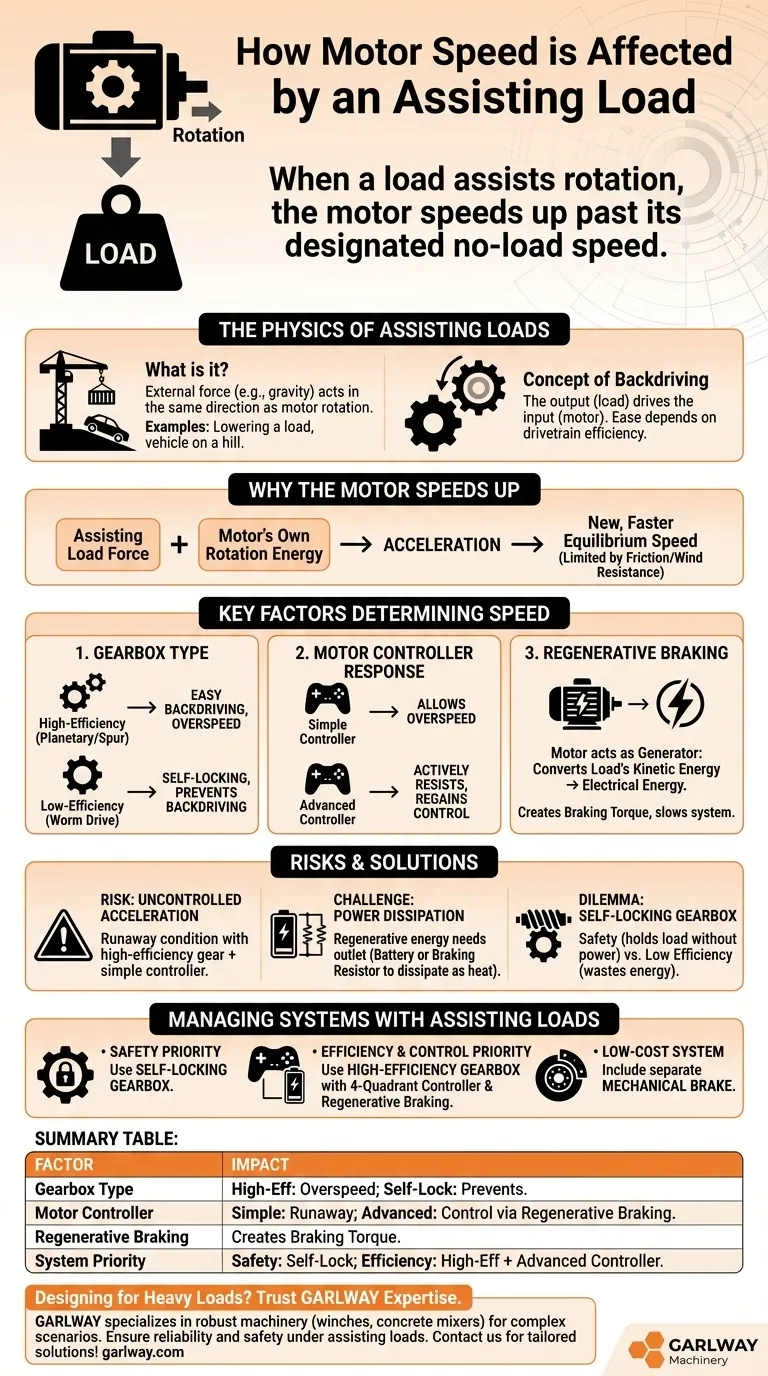
当负载辅助电机旋转时,电机将加速,通常会超过其指定的空载速度。这种加速的程度取决于系统的机械特性,特别是负载通过其齿轮箱“倒转”电机的难易程度。
辅助负载或“超重”负载将其自身的能量添加到系统中,迫使电机加速。最终速度成为这种外部力与系统抵抗它的能力之间的平衡,这种特性主要由齿轮箱设计和电机控制器的响应决定。
辅助负载的物理原理
要正确控制电机速度,您必须首先了解当负载不抵抗运动而是帮助运动时所涉及的力。
什么是辅助负载?
辅助负载,也称为超重负载,是指与电机预期旋转方向相同的任何外部力。
常见示例包括起重机降低重物时的重力或车辆沿陡坡行驶。在这些情况下,电机任务从驱动负载转变为控制其下降。
倒转的概念
倒转是指系统输出(负载)驱动输入(电机)的术语。这是正常操作的相反情况。
想象一下将玩具车推上山坡——这是正常操作。现在,想象一下在山坡上固定那辆车以控制它滚下山坡——这就是管理倒转负载。发生的难易程度完全取决于传动系统。
电机加速的原因
如果没有控制机制,辅助负载的能量将与电机自身的旋转相结合,导致加速。
系统将继续加速,直到摩擦力和风阻力产生的阻力足以抵消辅助负载的力,从而建立一个新的、更快的平衡速度。

决定最终速度的关键因素
实际速度不是无限的;它受到系统中几个关键组件的限制。
齿轮箱的关键作用
齿轮箱通常是最重要的因素。其倒转能力取决于其设计和内部摩擦。
高效率的齿轮类型,如直齿轮或行星齿轮,可以非常容易地倒转。它们对负载的阻力很小。
相反,低效率的齿轮类型,特别是高传动比的蜗轮蜗杆,可以自锁。齿轮箱内部的摩擦力非常大,即使没有电源,也能在机械上阻止负载倒转电机。
电机控制器的响应
简单的电源提供电压并让电机旋转。然而,复杂的电机控制器可以检测超速状况。
当控制器看到电机旋转速度超过指令速度时,它可以改变其行为,主动抵抗运动并重新控制速度。
再生制动
当负载迫使电机在给定电压下比其空载速度旋转得更快时,电机本质上会变成发电机。
这个过程称为再生制动,它将负载的动能转化为电能。这种发电会产生与负载直接相反的制动扭矩,从而减慢系统速度。先进的电机控制器在下降过程中利用此原理精确控制速度。
理解权衡和风险
管理辅助负载涉及安全、效率和成本之间的关键工程权衡。
失控加速的风险
如果您将高效率齿轮箱与无法制动的简单控制器配对,辅助负载可能会导致失控。这可能导致危险的速度,从而损坏电机、传动系统或负载本身。
功率耗散的挑战
再生制动会产生电能,而这些能量必须去某个地方。它可以为电池充电,但如果电池已满或您使用的是市电电源,则能量无处可去。
这可能会导致电压尖峰,从而损坏电机控制器。解决方案是使用制动电阻器,它旨在将多余的能量安全地以热量的形式耗散掉。
自锁齿轮箱的困境
自锁蜗轮蜗杆提供了固有的安全性,因为即使系统失去所有电源,它也能将负载保持在原位。
然而,这种安全性是以效率非常低为代价的。在正常运行期间,相同的内部摩擦会以热量的形式浪费大量能量,从而需要更大的电机和更多的功率。
如何管理带有辅助负载的系统
您的设计选择完全取决于您的首要任务是故障安全负载保持还是高效、受控的运动。
- 如果您的主要重点是安全和保持负载静止:使用自锁齿轮箱,例如高传动比的蜗轮蜗杆,以在机械上防止倒转。
- 如果您的主要重点是能源效率和精确的速度控制:使用高效率齿轮箱和四象限电机控制器,该控制器可以执行再生制动并管理耗散的能量。
- 如果您的主要重点是简单、低成本的系统:您必须包含一个单独的机械制动器,以安全地保持负载并防止失控。
最终,了解您的负载如何与您的传动系统相互作用是设计安全、高效和可靠的运动系统的关键。
摘要表:
| 因素 | 辅助负载对电机速度的影响 |
|---|---|
| 齿轮箱类型 | 高效率齿轮(例如,行星齿轮)允许轻松倒转和超速;自锁齿轮(例如,蜗轮蜗杆)可防止这种情况。 |
| 电机控制器 | 简单控制器可能导致失控;高级控制器可以使用再生制动来保持控制。 |
| 再生制动 | 将多余的动能转化为电能,产生制动扭矩以减慢系统速度。 |
| 系统优先级 | 安全:使用自锁齿轮箱。效率:使用高效率齿轮箱和高级控制器。 |
正在为重载设计可靠的运动控制系统? GARLWAY 专注于坚固的建筑机械,包括绞车和混凝土搅拌机,旨在安全高效地处理复杂的负载场景。我们的专业知识确保您的设备在辅助负载下可靠运行,防止失控并最大限度地提高正常运行时间。让我们讨论您的具体应用需求 — 立即联系我们的工程团队 以获得定制解决方案!
图解指南